
Industrial AMR / UGV Mobile Robot Platform | Physical AI Ready | VLP-16 LiDAR, SLAM, Teleop, Autonomous Waypoint Navigation | Field-Proven, IP Included














Overview
- Condition of the Robot: Used - Good
- Robot Payload: Modular T-slot deck (capacity TBD)
- Robot Reach : ~100 ft validated waypoint mission range
- Robot Serial # : Available upon purchase
- Robot Controller Model : NI CompactRIO (cRIO-90xx) with NI 9411 & NI 9375 C-Series modules
Description
Ready-to-run industrial AMR / UGV mobile robot platform with a real deployment history, full IP rights included, and a clear path to a modern physical AI autonomy stack. Skip a year of integration work and start running pilots, demos, or product builds on a base that already drives, navigates, and stops safely.
UPGRADE OPTIONS & REPLACEMENT PARTS INVENTORY AVAILABLE. CUSTOM CONFIGURATION AVAILABLE.
This rover was originally built as a vehicle-agnostic autonomy testbed and demo unit for industrial automation programs with major rental and construction partners. It ran the same hardware and software stack used in larger autonomous deployments on construction equipment, UTVs, and other ground platforms operated from a centralized multi-unit mission control. Teleop, waypoint navigation, full autonomous mode, and remote safety controls are all built in.
Why this is worth a look
Field-proven AMR / UGV with real industrial run time, not a paper prototype.
Vehicle-agnostic autonomy architecture that ports to other drive bases and form factors.
Industrial-grade sensing, safety, and power components throughout.
Full IP rights for the platform are included, with related project IP available for negotiation.
Defined roadmap to a hardware-agnostic, physical AI ready autonomy stack on modern compute and sensors.
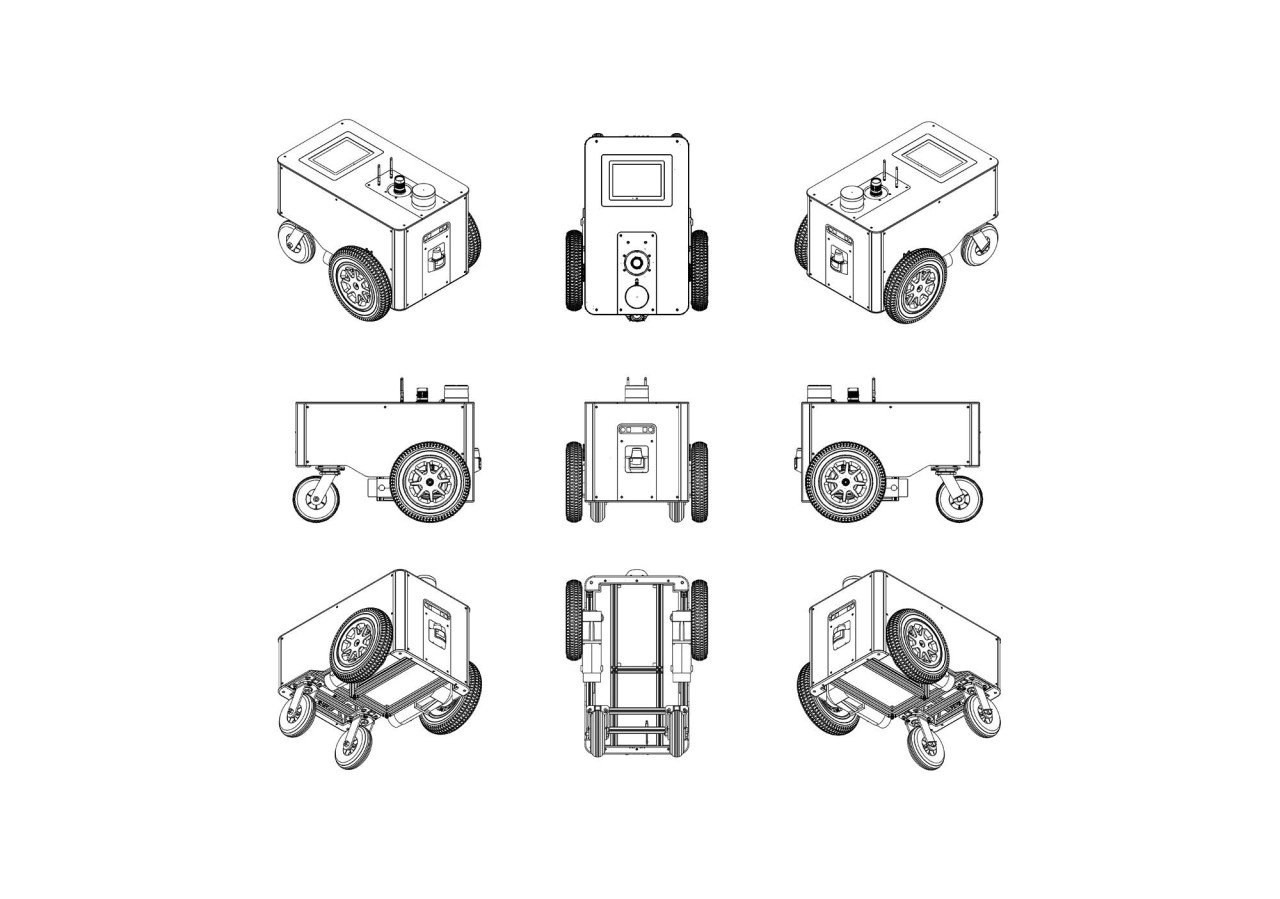
Chassis and drive
Heavy-duty Bosch Rexroth 30×30 aluminum extrusion frame, fully modular and T-slotted for fast payload changes.
Differential drive with two powered wheels and two pneumatic casters.
14″ x 3″ drive wheels with dedicated left and right motors.
8″ swivel pneumatic casters.
Independent solenoid-actuated left and right chassis brakes.
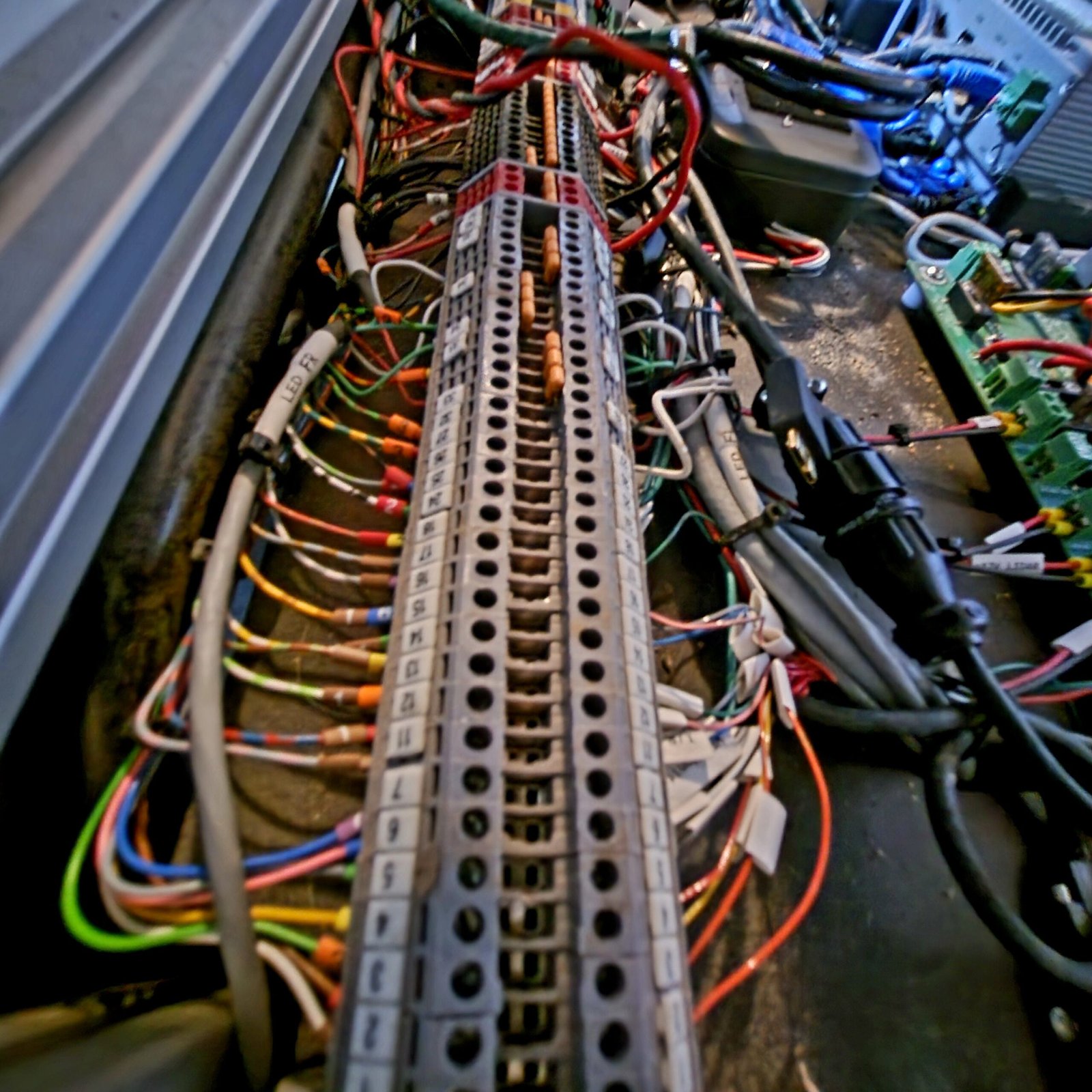
Power and electrical
E-bike style battery packs with a master power switch and onboard charge port. Charger included.
12V to 5V DC-DC conversion for subsystems.
Custom ExpressPCB power distribution board.
Bussmann 150A / 600VDC heavy-duty circuit breaker.
Sensors and compute
NI CompactRIO (cRIO-90xx) real-time motion controller.
NI 9411 digital input and NI 9375 digital I/O modules.
Velodyne VLP-16 (Puck) 3D LiDAR for 360 degree perception.
Keyence SZ-16V industrial safety scanner with a hard-wired Stop Zone at about 11 inches in front of the rover.
9MP Graftek lens (1 inch, 16mm, f/1.4) with a TIS GigE camera, 850nm OverDrive ring light, and an auxiliary bar light.
Onboard industrial PC running Ubuntu Linux for SLAM and mapping.
Windows touchscreen tablet as the operator console.
Localization and navigation
SLAM mapping on the onboard IPC.
Passive top-down localization using ceiling-mounted AprilTag fiducials, cross-referenced with the onboard camera.
Waypoint missions validated up to roughly 100 ft, extendable with more survey work.
Default speed cap of 0.5 m/s, configurable in the waypoint config tables.
Networking and control
Onboard Wi-Fi, broadcast Wi-Fi, and remote shell access into the vehicle.
Remote host application for mission planning, diagnostics, and debugging.
Xbox 360 wireless controller for teleop, upgradeable to the Fort Robotics EPC1000 safety controller for one-to-many remote operation.
Safety
Hard-wired wireless E-stop transmitter and receiver. The drive motors are physically cut from the safety relay regardless of what the software is doing.
Two-person operating protocol with a wireless line-of-sight range of about 25 m (82 ft).
Industrial Keyence safety scanner for real-time obstacle interruption.
Roadmap
The next step for this platform is a fully hardware-agnostic autonomy stack on modern physical AI compute and current generation sensors. The development work has started, the roadmap is in place, and potential grant and program funding sources have been identified but not yet applied for. Completing that upgrade is open to negotiation as part of a sale or partnership.
What is included on purchase (digital delivery)
Full engineering documentation and mechanical drawings.
Costed hardware BOM with a baseline value of about $128,000.
Software, firmware images, and configuration files.
Spare parts.
IP rights for the platform. Additional related project IP available for negotiation.
Who this is for
Robotics integrators, OEMs, research labs, defense and logistics R&D groups, and startups that want a working AMR / UGV base they can use to accelerate R&D, demos, or commercial product development for autonomous ground systems.
Environment
Currently configured for indoor use on flat, controlled flooring. The chassis and drive can be reconfigured for outdoor use and rougher terrain.
Contact for technical questions, BOM review, or to discuss negotiated IP, customization, and roadmap completion.
Features:
- Field-proven industrial AMR / UGV mobile robot platform
- Physical AI ready, hardware-agnostic autonomy roadmap in progress
- Vehicle-agnostic autonomy stack that ports to other drive bases
- Teleop, waypoint, and full autonomous navigation modes
- Compatible with centralized multi-unit mission control
- Velodyne VLP-16 (Puck) 3D LiDAR perception
- Keyence SZ-16V industrial safety scanner with hard-wired Stop Zone
- NI CompactRIO (cRIO-90xx) real-time motion controller
- 9MP machine vision camera with AprilTag indoor localization
- SLAM mapping on onboard Ubuntu Linux industrial PC
- Bosch Rexroth 30x30 modular aluminum extrusion chassis
- 14" differential drive with independent left and right solenoid brakes
- Hard-wired wireless E-Stop that physically cuts motor power
- Bussmann 150A / 600VDC heavy-duty circuit breaker
- Costed hardware BOM baseline of about $128,000
- Full engineering documentation, drawings, and software delivered digitally
- Spare parts included
- IP rights included, with additional related project IP available for negotiation
- Suited for robotics integrators, OEMs, research labs, and defense or logistics R&D
Related Ads

Leave feedback about this
You must be logged in to post a review.